
Precision Landing
A resilient landing solution for Uncrewed Aerial Vehicles (UAVs) is essential if they are to perform missions in extreme conditions, especially if satellite navigation systems are unavailable, obstructed, or jammed.
A drone can pinpoint a mission endpoint with centimetre accuracy and without satellite positioning or intercommunication, provided the landing site is equipped with ARCTM radars.
ARCTM offers high-fidelity localisation functionality based on direct radar range measurements, operating independently of satellites and highly resilient to jamming mechanisms.
How it works
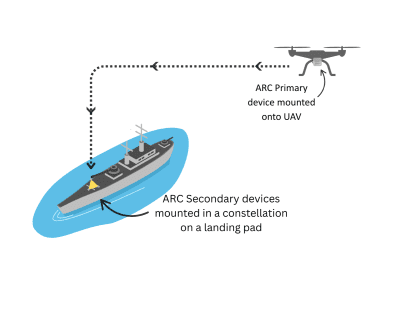
ARCTM consists of a primary radar mounted on the UAV and secondary radars installed on the landing pad. The primary device accurately measures the range and direction of the secondary devices and sends this information to the UAV flight controller. The primary radar sends this target information via the MAVLink Precision Landing Target protocol. All information is automatically processed and verified by MAVLink compatible flight controllers, such as ArduPilot and PX4, facilitating an autonomous landing. ARCTM also accounts for roll/pitch/yaw movements, typical of dynamic landing pads such as those found on a vessel.
Key Features
-
Small, ultralight radar specifically designed for battery power in UAVs -
Highly effective in adverse weather and low light -
Operates in GNSS-denied environments -
Provides range (to 1cm), elevation, bearing and altitude -
Full yaw flexibility on approach to the landing pad -
Advanced offset landing capability -
Unique patented comms channel between primary and secondary radar units for additional CONOPS management -
Highly resilient to jamming/spoofing technologies
Benefits
-
Provides essential resilience to critical landing phase -
Improves safety of landing process -
Reduces reliance on pilots and spotters -
Reduces risk to life and infrastructure -
Reduces operational costs -
Provides BVLOS operational robustness.
ARCTM is a proven technology that has been integrated into partner UAVs, with numerous real-world deployments.
ARCTM can also be used to maintain a fixed position and altitude above a designated target point, for further information see Positional Tethering.
Watch these videos to learn more
Autonomous platform follow and landing on a moving vehicle using ARCTM
With Sensoriis’ ARCTM radar system integrated onto Evolve Dynamics‘ SKY MANTIS 2, the UAV can perform precision landing, tethering and zonal position hold without the use of any other sensors, making it ideally suited to operation in GNSS-denied environments.
Precision tethering and landing on a moving vessel using ARCTM
Evolve Dynamics performed the first precision landing and tethering of their SKY MANTIS 2 on a moving vessel using Sensoriis’ ARCTM radar system . Positional data was passed from the ground platform to the airside module mounted on the aircraft.
With the integration of sensor devices, the UAV was able to follow and land on a moving boat without the use of additional sensors.