
Positional Tethering
“UAV loiter” is an operational mode where a UAV navigates to and maintains a fixed position and altitude above a designated target point. It is especially valuable for intelligence, surveillance, and reconnaissance (ISR) missions, or search and rescue operations where speed and precision are crucial. ARCTM is indispensable in these scenarios, as it enables radar-based tethering above both stationary and moving vehicle positions.
How it works
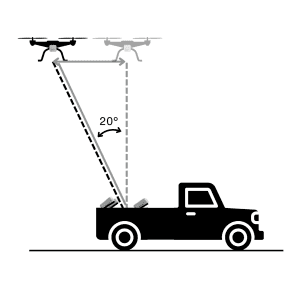
An ARCTM system comprises a primary radar mounted on the UAV and a corresponding secondary constellation. The Primary device accurately measures the range and direction of the secondary devices and uses this information to provide a precision loiter target position to the UAV flight controller via the MAVLink protocol.
The UAV constantly maintains its position while tracking the secondary constellation on a moving vehicle or ship. ARCTM also makes sure that the UAV remains stationary even if the landing pad is lifted, demonstrating the system’s ability to effectively compensate for roll and pitch movements, as seen on moving or unstable platforms.
Key Features
-
Small, ultralight radar specifically designed for battery power in UAVs -
Highly effective in adverse weather and low light -
Operates in GNSS-denied environments -
Provides range (to 1cm), elevation, bearing and altitude -
Advanced offset tethering capability -
Unique patented comms channel between primary and secondary radar units -
Highly resilient to jamming/spoofing technologies
Benefits
-
Reduces reliance on pilots and spotters -
Provides positional resilience to tethering applications -
Provides positional assurance in GNSS-denied environments -
Reduces operational cost -
Increases operational duration/bandwidth.
ARCTM is a proven technology that has been integrated into partner UAVs, with several real-world deployments secured.
ARCTM is also a resilient landing solution for precision landing on a static or moving pad or vehicle – including vessels at sea, for further information please see Precision Landing.